近日,中国科学院空天信息创新研究院(空天院)副研究员聂胜研究团队发布森林场景机载地基点云配准基准数据集。
机载激光雷达(ULS)和地基激光雷达(TLS)近几年来在森林资源调查领域取得很大进展。ULS能快速获取大范围冠层信息,TLS则能精细刻画林下细节。通过两者融合,能得到森林场景全面高精度的三维数据,从而提高森林资源调查的效率与精度。
然而,森林场景的复杂性,不同传感器的视角差异,点云分布的不规则性等都使得精确配准成为挑战。尽管现有许多配准算法,但是缺乏它们在森林场景中的全面精度评估,且多平台点云配准基准数据集的缺失,也阻碍了配准算法的发展。
现有森林场景机载地基点云配准的难点与挑战
•配准算法
传统算法基于设计的特征描述符以及特征匹配策略实现配准,但森林点云的不规则性和复杂性加大了特征提取的难度,且不同视角导致的低重叠率使得特征匹配更加困难。基于深度学习的配准算法采用一些经典的网络架构提取隐含特征,但是缺乏合适的训练数据,不适用于森林场景机载地基点云配准。现有针对于森林场景的机载地基点云配准算法以树干或者树顶点为特征实现配准,但是缺乏在不同树种,不同地形下的全面精度测试。
•点云数据集
现有点云配准数据集关注于室内外结构化场景,且为单一平台,缺乏多平台点云配准数据集。而现有森林点云数据集关注于单木分割,语义分割,森林参数提取等任务,缺乏森林点云配准数据集。
面向森林场景的多平台点云配准基准数据集
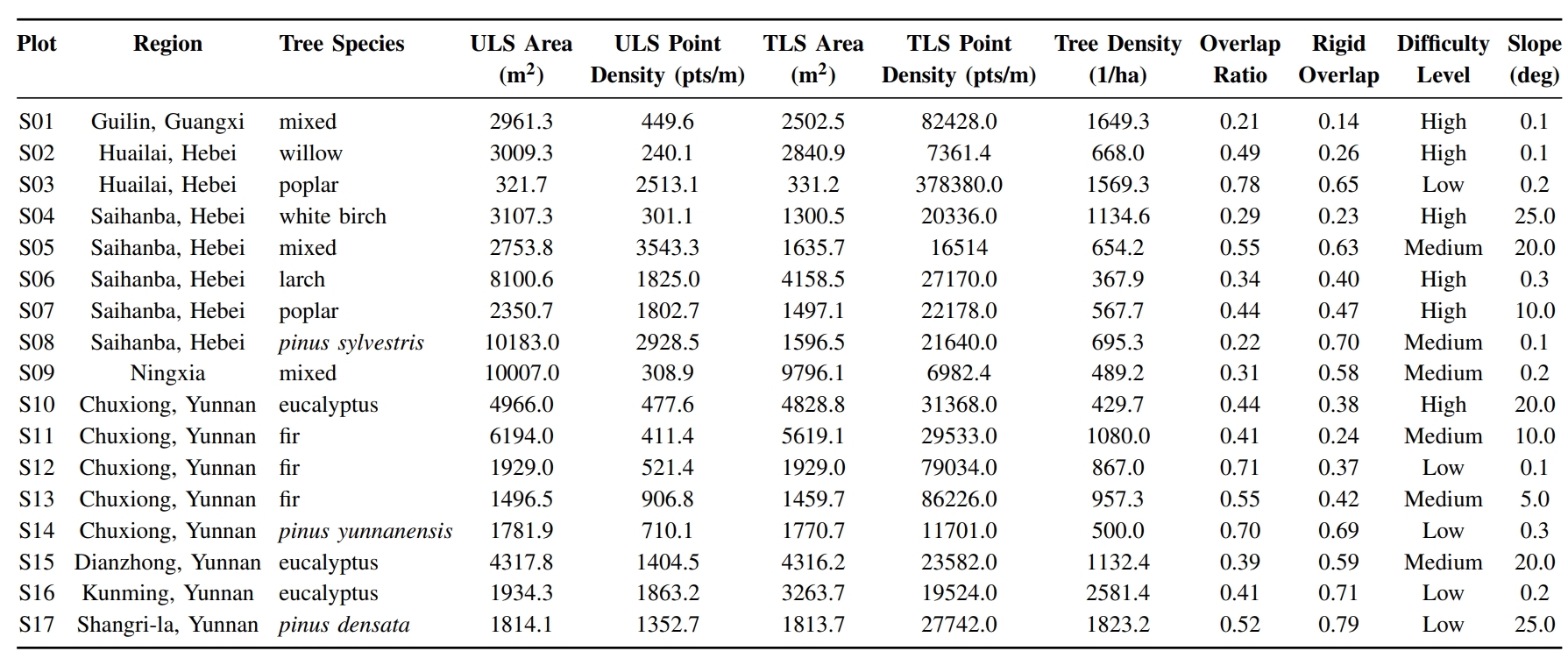
基于此,研究团队首次构建的面向森林场景的多平台点云配准基准数据集,共包含17个样地,涵盖7个研究区、9大树种和不同地形条件。研究团队创新性地根据点云重叠率与刚体点云重叠情况,将数据集划分为三个配准难度等级,系统性评估几种代表性配准算法的性能;同时,分析了地形、重叠率和刚体点云重叠情况对配准难度的影响,并提出未来研究方向的展望。
•ULS-TLS森林点云配准数据集
研究团队通过采用自动手动相结合的方法生成配准变换矩阵真值。首先对所有点云采用自动化配准算法进行配准,再目视检查树干树枝配准效果,如果不满足要求,则进行手动配准。最后,再通过重叠率和刚体重叠情况对点云进行难度分级。
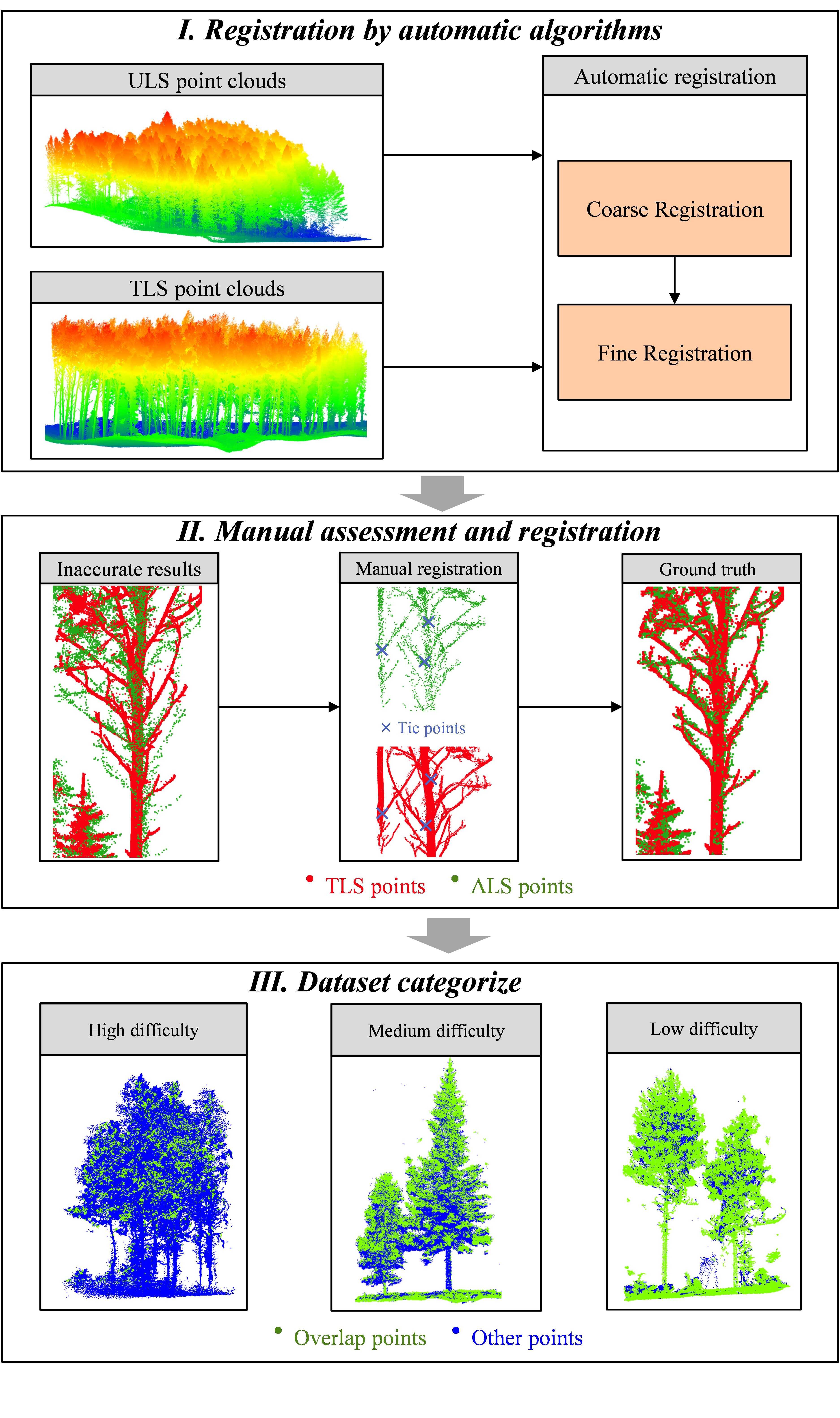
图1 数据集生产流程图
表1 数据集信息表
•算法配准精度评估
研究团队基于配准成功率、旋转误差、平移误差以及点级别误差对几种代表性算法进行精度评价。基于上述数据集的各算法,进行配准评估,由下图可知配准误差随着样地难度增大而增大,证明研究团队提出的难度分级标准的有效性。
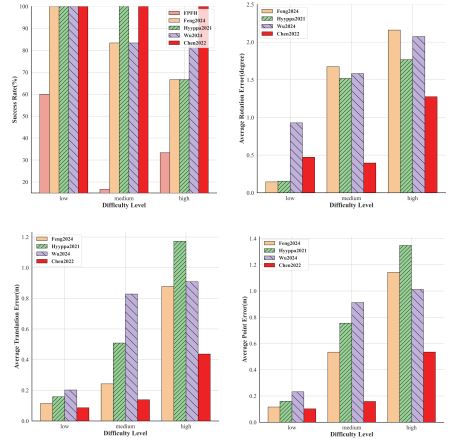
图2 精度评估结果
•不同因素对配准的影响
通过对各样地配准精度的分析,研究团队发现地形和刚体重叠情况对于以树干为特征配准算法有较大影响,而对于以树顶点和全局点为特征的配准算法,重叠率影响则较大。
研究成果以“Benchmarking ULS-TLS Point Cloud Registration Algorithms in Forest Environments”为题发表于遥感领域权威期刊《IEEE Transactions on Geoscience and Remote Sensing》(中国科学院一区)。空天院博士生刘王军为第一作者,中国科学院青促会会员、空天院副研究员聂胜为通讯作者。合作单位还包括长沙理工大学和云南师范大学。该项研究工作得到国家重点研发计划、国家自然科学基金等项目资助。
面向森林场景的多平台点云配准基准数据集:
获取方式1:https://www.noda.ac.cn/datasharing/datasetDetails/67d28a282d0965411c3c277c
获取方式2:https://huggingface.co/datasets/lewisciro66/ForestReg


动态新闻